Curso de Control: 7. Ajuste de un controlador P
Vamos a empezar la primera actividad con el ajuste de uno de los controladores más sencillos que existe, el controlador proporcional o simplemente P. Este controlador lo hemos visto de pasada en capítulos anteriores, se trata del controlador estático, una simple constante multiplicando a la señal de error y su salida es la señal de control.

Este controlador debido a su sencillez, sólo nos ofrece un grado de libertad, modificar el valor de la constante (kp) y por lo tanto tendremos algunas limitaciones que veremos en la práctica.
Nuestro objetivo va a ser conseguir que la salida del sistema siga a la referencia, que va a ser una señal de escalón unitario, esto es que en el instante 0 pasa de 0 a 1 inmediatamente, por eso tiene una forma de escalón.
¿Cómo quedaría si no utilizáramos ningún control y no cerráramos el bucle? Directamente aplicando la referencia en escalón al bucle obtendríamos esto:

La línea azul nos muestra la evolución del sistema y la verde el valor al que tiende en el infinito. Como vemos el sistema llega a 10 en lugar de a 1 y es bastante lento, unos 50 segundos, así que vamos a mejorar todo esto con nuestro control P.
Para probar distintos valores de kp en el bucle de una forma sencilla podéis descargaros este script que he hecho para Octave, el funcionamiento es el siguiente: tenéis un sistema por defecto dentro del script y todo montado para simular. Nos situamos en Octave dentro de la carpeta donde hemos guardado el script y llamamos a la función del controlP:
controlP(kp)Donde kp es la constante proporcional que queramos utilizar. Podemos probar por ejemplo:
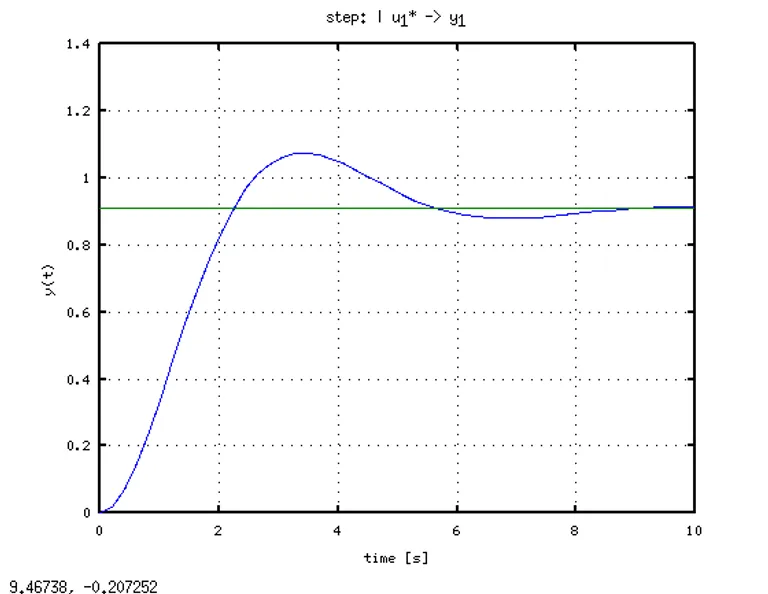
controlP(1)Y nos mostrará la siguiente imagen:

Vemos que el control ha mejorado bastante, es como 5 veces más rápido y a pesar de que aún no llega a 1 exactamente ya se acerca bastante más y no se pasa demasiado en el trayecto (sobreoscilación). Ahora podemos ir buscando una kp que haga que el sistema funcione más a nuestro gusto.
El objetivo de la actividad es experimentar con el control proporcional y buscar una buena respuesta, podéis escribir un post con la experiencia en vuestro blog y si no dejarla en comentarios o mandármela por correo con vuestro nombre/alias y yo la publicaré en los comentarios.
Suerte.