Curso de Control: 8. Ajuste de un controlador PD
La semana pasada estuvimos probando el control P, vimos que al tener solo un grado de libertad no obteníamos unas respuestas totalmente a nuestro gusto. Hoy vamos a mejorar esto añadiéndole al control una componente derivativa, lo que se conoce también como acción derivada.
El mecanismo de la acción derivada es sencillo, intenta corregir la pendiente del error, esto provoca que la salida se suavice, es decir, que no tenga grandes pendientes y con esto conseguimos reducir e incluso eliminar la sobreoscilación.
Igual que el último día podéis descargar la función controlPD, de aquí, el funcionamiento es muy parecido:
controlPD(kp,Td)El sistema a controlar no ha cambiado, pero ahora podemos modificar dos parámetros para mejorar el control: kp, que afecta a la parte proporcional y Td que afecta a la parte derivativa.
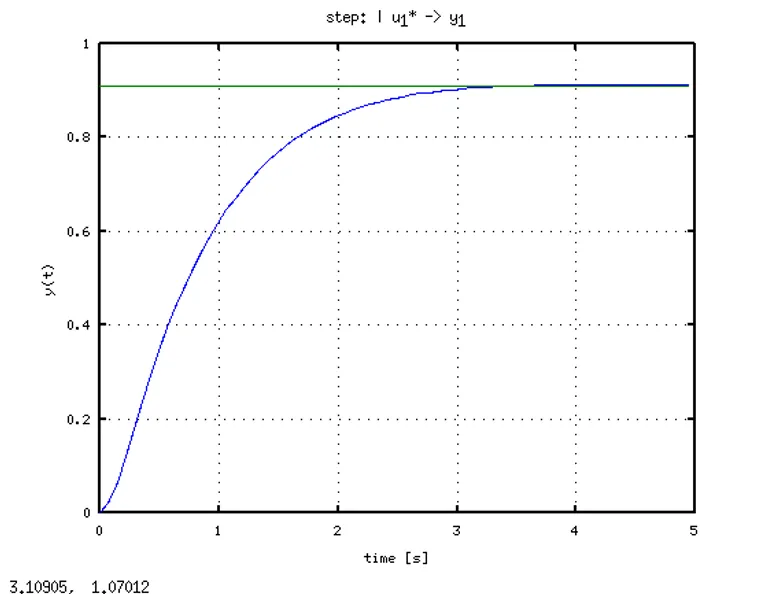
Vamos a probar algo sencillo:
controlPD(1,1)Y obtenemos la siguiente respuesta:

Vemos que el control es algo más rápido y se ha eliminado la sobreoscilación que teníamos con el control P.
Ahora toca jugar un poco. ¿Hasta donde podéis llegar con estos dos parámetros?