Curso de Control: 9. Ajuste de un controlador PI
Uno de los problemas de los controladores que hemos visto hasta ahora es que no garantizan que lleguemos al punto de referencia después de todo el transitorio, la diferencia entre la referencia y la salida una vez se ha estabilizado se llama error en régimen permanente.
Para eliminar este error se utiliza la acción integral, vamos a ver un caso práctico con un controlador PI, como en capítulos anteriores tenéis a vuestra disposición un pequeño script donde probar los resultados, lo podéis descargar aquí.
El funcionamiento del script es similar a los anteriores:
controlPI(kp, Ti)En este caso la constante que afecta al término integral es Ti y nos da una idea de en cuanto tiempo va a actuar esta acción integral, vamos a ver un ejemplo:
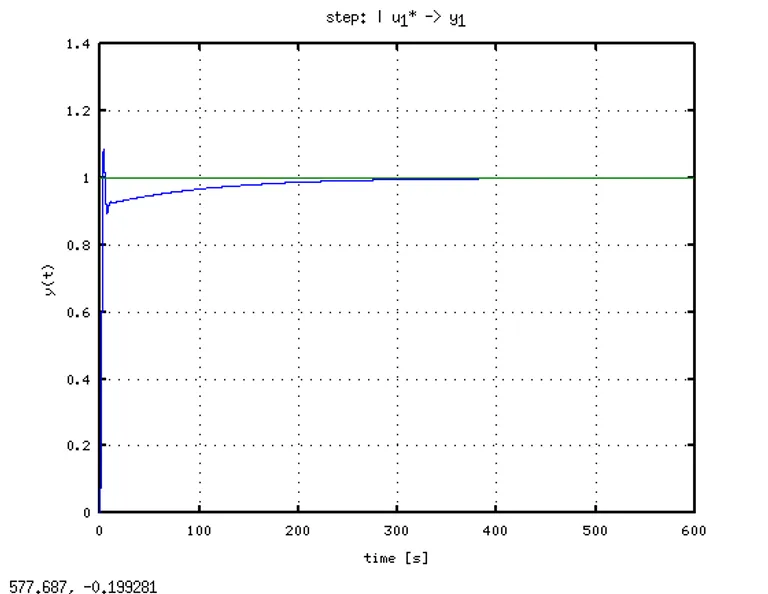
controlPI(1,100)Esto nos va a dar una respuesta como la siguiente:

Como podemos observar la señal de salida que en un principio parece que se va a estabilizar en 0.9 poco a poco se va corrigiendo hasta llegar a 1 de una forma suave.
A partir de aquí podemos empezar a jugar con nuestras constantes para obtener una buena respuesta igual que en capítulos anteriores. En el próximo vamos a ver el controlador que mejor resultados nos va a dar, el que combina la acción derivada con la integral, el PID.