Curso de Control: 10. Ajuste de un controlador PID
Llegamos al último tipo de controlador que vamos a ver, el que aúna los tres tipos de control que ya hemos visto. Como ya he explicado anteriormente el uso que le damos a los parámetros kp, Ti y Td, os recomiendo que volváis a esas explicaciones si tenéis dudas y os paso directamente el archivo de la semana, esta vez con la siguiente sintaxis:
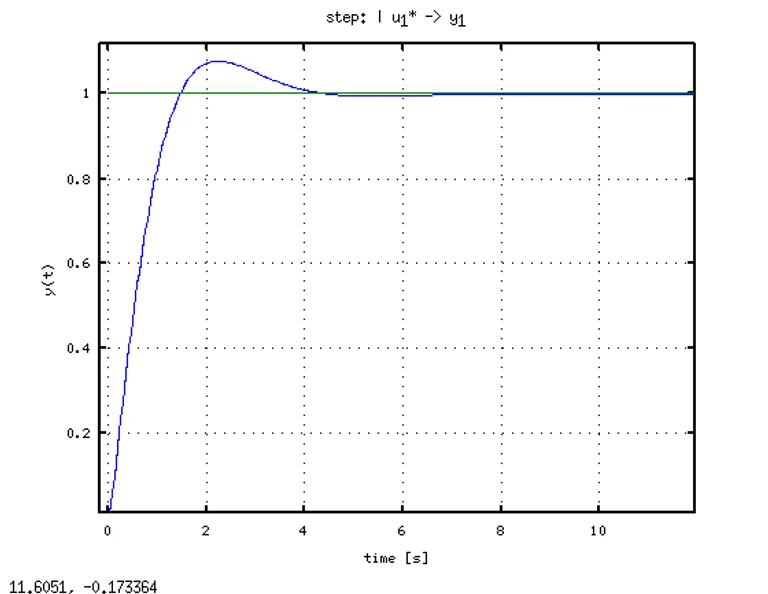
controlPID(kp, Ti, Td)Ahora las combinaciones posibles son enormes y tenemos una gran libertad de elección, pero os dejo a vosotros que experimentéis y os paso una imagen de muestra, a ver si conseguís algo parecido.
