Control aplicado a la electrónica
Nuestro curso de control libre y distribuido sigue dando guerra. En este caso voy a hablar de un ejemplo aplicado control en electrónica que ha diseñado Pablo Trujillo y nos muestra en su blog (ahora con dominio propio).
El objetivo es sencillo, se trata de una sencilla fuente de alimentación lineal, dada una tensión de referencia se pretende obtener esa tensión en la salida sin que se vea afectada por la carga que le coloquemos. Para obtener esto es necesario aplicar el principio fundamental del control, cerrar el bucle, y después implementar un controlador.
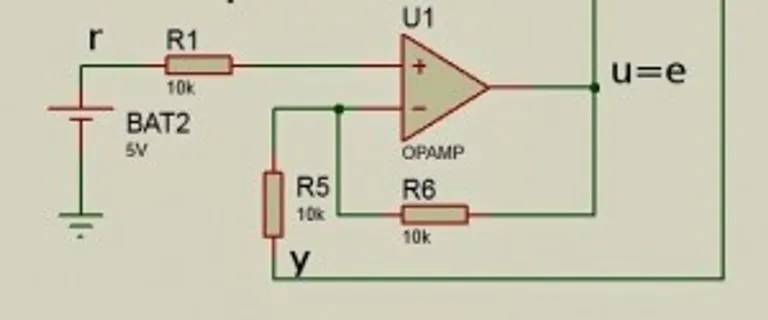
Para ello Pablo utiliza una implementación del controlador basada en electrónica analógica pura. Para ello utiliza un operacional en configuración restador, lo que nos proporcionará la señal de error.

En este caso podemos decir que el controlador es un proporcional con ganancia (Kp) 1, es decir que la acción de control y el error son iguales.
Veámoslo en el circuito:

Como hemos visto en el curso, este controlador tan sencillo puede producir un error en régimen permanente que para una fuente de tensión no es tolerable, la solución ya la conocemos, implementar un control PI, y eso mismo ha hecho su diseñador.
Esto en electrónica queda de la siguiente forma:

Como vemos lo único que ha cambiado es que en lugar de una resistencia en la realimentación del operacional hay un condensador. Esta configuración responde a la siguiente ecuación:
$$ u(t)= \frac{1}{RC} \int (y(t)-r) \mathrm{d}t $$
O en Transformada de Laplace y sabiendo que y-r=e:
$$ u(s)= \frac{1}{RCs} e(s) $$
Si pasamos la señal de error al otro miembro de la ecuación y subimos arriba la constante nos queda algo más parecido a una Función de Transferencia:
$$ \frac{u(s)}{e(s)}= \frac{\frac{1}{RC}}{s} $$
Y ahí tenemos nuestro PI, con una ganancia ajustable de 1/RC.
Este es un ejemplo de una implementación de controladores de forma analógica, se puede implementar un controlador de muchas formas: mecánico, redes neuronales artificiales, lógica borrosa o analógico como éste, pero definitivamente la forma mas extendida es la digital, la que veréis en la mayor parte de PIDs comerciales.
Aunque este curso aún no se ha metido en cosas tan complejas como el desarrollo matemático y la implementación, siempre es recomendable pegarle una ojeada a los resultados finales que es posible obtener aplicando control.
Imágenes cortesía de mips & chips.